Fast rotation search with stereographic projections for 3D registration
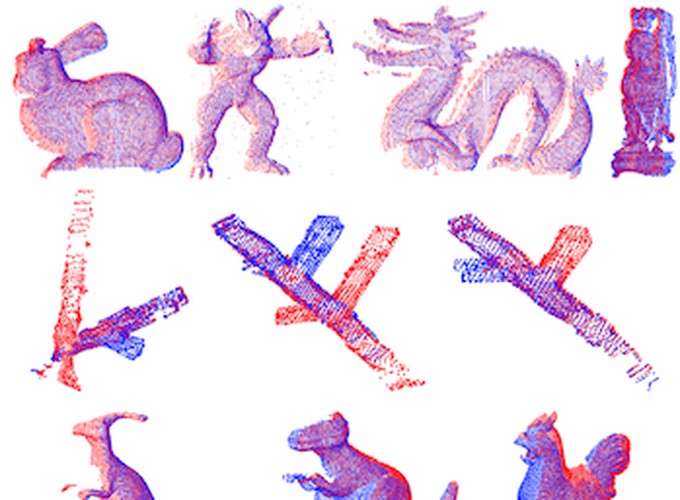
First we present a globally optimal 3D rotation search method. Based on branch and bound, bound evaluations are accelerated by using stereographic projections to precompute and index all possible point matches in spatial R-trees.
Also we present a global 6 DoF point cloud registration algorithm which uses our rotation search algorithm as a kernel in a nested branch and bound design. The presented algorithm does not assume any constraints on the original alignment of the point clouds. The algorithm is based on nested BnB, whereby an outer BnB loop optimises the translation and the inner BnB loop conducts rotation search.
Source code
The C++ code of the 3D rotation search algorithm and the 6 DoF nested registration algorithm is publicly available. The zip file also includes mex binaries for Windows, Linux and OS X. For usage, refer to the readme file and to the MATLAB demo included within the zip file. Please contact me for help or comments.
Fast rotation search for real-time interactive point cloud registration
This work presents an user-assisted system for horizontally levelled point clouds. The system generates instant guidance to the user to facilitate finding a correct alignment. The key component of the system is a novel real-time and globally optimal 1D rotation search algorithm. See the system in action in our demostration video.
Source code
The C++ code of the 1D rotation search algorithm is publicly available. The zip file also includes mex binaries for Windows, Linux and OS X. For usage, refer to the readme file and to the MATLAB demo included within the zip file. Please contact me for help or comments.
All source codes, binaries and demos are distributed for academic use only. For any other use, including any commercial use, please contact me first.