Space Robotics and Rovers
We are affiliated with the Andy Thomas Centre for Space Resources.
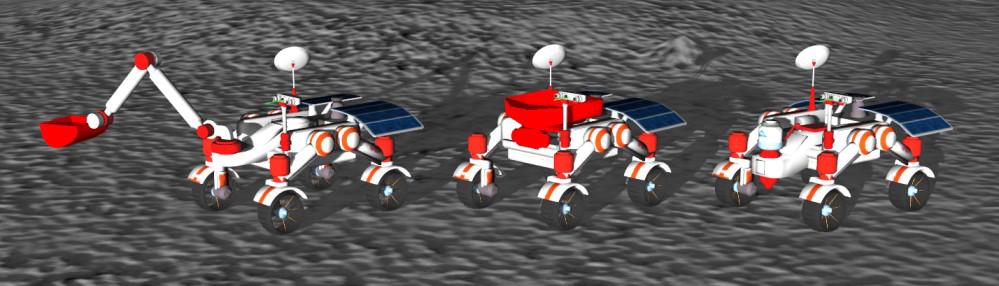
Autonomous Rovers
In-Situ Resource Utilisation (ISRU) refers to mining resources on other planetary bodies (primarily the Moon and Mars) and using them to support longer and deeper space missions. The difficulties of building a large-scale human presence in space and the lack of real-time interplanetary communication means that space mining will have to depend on robots with a high level of autonomy. However, the lack of infrastructure means that autonomous rovers will need to contend with hazardous terrain, lack of accurate positioning systems, limited power supply, and many other difficulties. Space robotics has been identified by NASA as a Centennial Challenge.
Space mining will likely utilise a fleet of heterogeneous robots that must collaborate to accomplish the goal. Thus, apart from meeting the challenges above, an autonomous rover must also manoeuvre and interact with other robots without causing damage. This argues for a high degree of intelligence on each agent and a robust multi-robot coordination system to ensure long-term operation.
NASA Space Robotics Challenge
At The University of Adelaide, we are researching machine learning and robotic perception to address some of the key challenges towards autonomous robots for collaborative space mining: lack of satellite positioning systems, navigation in hazardous terrain, and the need for delicate robot interactions. Much of our efforts have been conducted under the NASA Space Robotics Challenge Phase 2 (SRCP2), in which participants developed software to enable a fleet of heterogeneous rovers to autonomously and collaboratively find and extract resources on a simulated lunar environment.

Robotic Perception for Autonomous Rovers
The solution developed by Team University of Adelaide extensively employed machine-learning based robotic perception to accomplish accurate localisation, semantic mapping of the lunar terrain, and object detection to facilitate accurate close range manoeuvring between rovers. The following media summarises the capabilities developed by the Adelaide team.

Results and Media Coverage
The solution developed by Team University of Adelaide won 3rd place and an Innovation Award in the NASA SRCP2 competition.
- Teams develop code to coordinate robots (NASA)
- University of Adelaide students win $100,000 from NASA (The Australian)
- University of Adelaide team wins third prize in NASA robotics challenge (Engineers Australia)
- Students honoured in NASA robotics challenge (University of Adelaide)
Relevant Publications
- Ragav Sachdeva, Ravi Hammond, James Bockman, Alec Arthur, Brandon Smart, Dustin Craggs, Anh-Dzung Doan, Thomas Rowntree, Elijah Schutz, Adrian Orenstein, Andy Yu, Tat-Jun Chin and Ian Reid. Robotic Vision for Space Mining. 2021.